
Panasonic Saturn Lens Dual Zone EKMB and EKMC PIR (Passive Infrared) sensors are low power motion detector. The EKMB PIR sensors consumes as low as 1uA (EKMB 1100100) that is suitable for battery-powered applications. The Saturn Lens EKMB and EKMC PIR sensors are capable of realizing two functions in one lens, detecting standard motion in and out in the outer areas (90° x 90°) and slight motion in and out in the center area (44° x 44°) as shown in below figure.
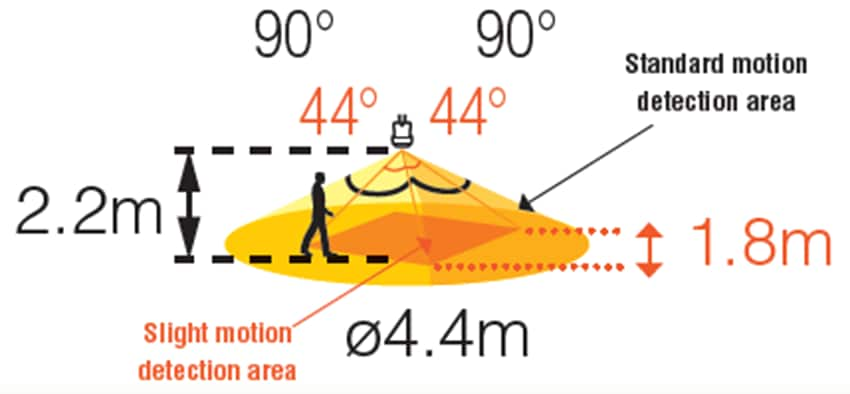
The low current EKMB series PIR sensors have three types, 5m standard detection type, 12m long distance detection type and wall installation type.
The specs of the Saturn Lens PIR sensors shows a Twu stabilizing period immediately after the power supply is on, during which the sensor output stabiles. For 1 µA and 2 µA types sensors, the Twu period is typically 25 seconds and up to 210 seconds. For 6 µA type, the Twu is typically 10 seconds. The output signal must be discarded during the signal processing. An appropriate amount of delay is required for the valid output signals.
The following timing chart is for the low power 1 µA type of Saturn Lens PIR sensors. Three consecutive operation modes are enabled, and the following figure illustrates how it works.

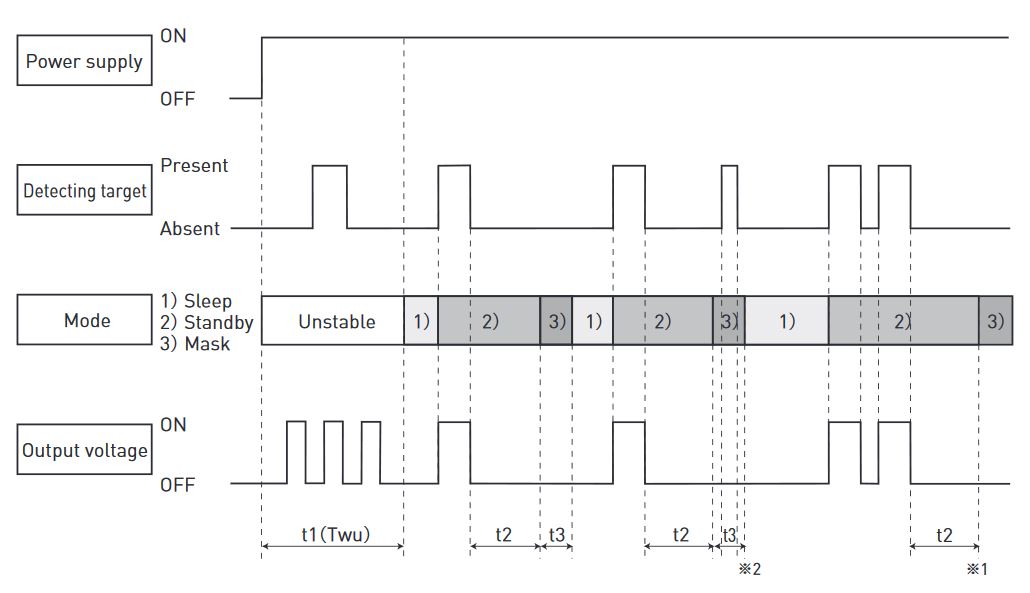
Sleep mode: after the unstable period at power on, the sensor’s output is off, and the current consumption is about 1 µA.
Standby mode: upon detection of target, the output is on and the sensor switches to standby mode, during which the current consumption is close to 1.9 µA.
Mask mode: the sensor output is forced to off after the standby mode, during which no detection is possible.
- t1: Twu output stabilizing time: 25 seconds (typical)
- t2: Standby hold time, about 2.6 seconds (typical) after the last detection of a signal;
- t3: Mask time, about 1.3 seconds (typical), the output is forced off and no detection is enabled.
The typical applications of the Panasonic Saturn Lens PIR sensors is lighting equipment in lavatories, fitting rooms and private office spaces, IoT occupancy sensor for smart home and low current consumption wireless devices.
Schematic:

Code:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 |
#include <avr/io.h> #include <util/delay.h> //delay loop functions #include <stdlib.h> #ifndef F_CPU #define F_CPU 16000000UL #endif #define LCD_Data_Dir DDRB//define lcd data port direction #define LCD_Command_Dir DDRC//define lcd command port direction register #define LCD_Data_Port PORTB//define lcd data port #define LCD_Command_Port PORTC//define LCD command port #define RS PC0 #define RW PC1 #define EN PC2 #define ALARM_LED PD1 #define PIR_IN PD0 void LCD_Command(unsigned char cmnd) { LCD_Data_Port = cmnd; LCD_Command_Port &= ~(1<<RS); LCD_Command_Port &= ~(1<<RW); LCD_Command_Port |= (1<<EN); _delay_us(1); LCD_Command_Port &= ~(1<<EN); _delay_ms(3); } void LCD_Char(unsigned char char_data) { LCD_Data_Port = char_data; LCD_Command_Port |= (1<<RS); LCD_Command_Port &= ~(1<<RW); LCD_Command_Port |= (1<<EN); _delay_us(1); LCD_Command_Port &= ~(1<<EN); _delay_ms(1); } void LCD_Init(void) { LCD_Command_Dir = 0xFF; LCD_Data_Dir = 0xFF; _delay_ms(20); LCD_Command(0x38); LCD_Command(0x0C); LCD_Command(0x06); LCD_Command(0x01); LCD_Command(0x80); } void LCD_String(char *str) { int i; for(i=0;str[i]!=0; i++) { LCD_Char(str[i]); } } void LCD_String_xy(char row, char pos, char *str) { if (row == 0 && pos<16) LCD_Command ((pos & 0x0F) |0x80); else if (row==1 && pos<16) LCD_Command((pos & 0x0F)|0xC0); LCD_String(str); } void LCD_Clear() { LCD_Command(0x01); LCD_Command(0x80); } int main() { LCD_Init(); DDRD = 0x02; //Port D pin 0 as input and pin 1 as output PIR_IN = 0x0; ALARM_LED = 0x0; // LED off _delay_ms(20); while(1) { if(PIR_IN) { ALARM_LED = 0x1; //LED ON LCD_String_xy(0, 0, "Warning!!!"); _delay_ms(3000);//delay } else { ALARM_LED = 0x0; LCD_String_xy(0,0, “Normal...”); _delay_ms(3000); } } return 0; } |
Read more at: https://na.industrial.panasonic.com/whats-new/saturn-lens-pir-motion-sensors